Was sind arithmetische und geometrische Zahlenfolgen?
Eine Zahlenfolge ist eine Vorschrift, die jeder eine zuordnet. Zahlenfolgen werden in der Mathematik oft zusammen mit Reihen behandelt.
Im Zusammenhang mit Folgen wird oft die Monotonie untersucht. Hier stellt man sich die Frage, ob die einzelnen Folgeglieder wertmäßig steigen oder fallen. Eine Folge ist monoton steigend / wachsend, wenn jedes Element mindestens genauso groß wie das vorangehende Element ist.
Arithmetische Zahlenfolgen
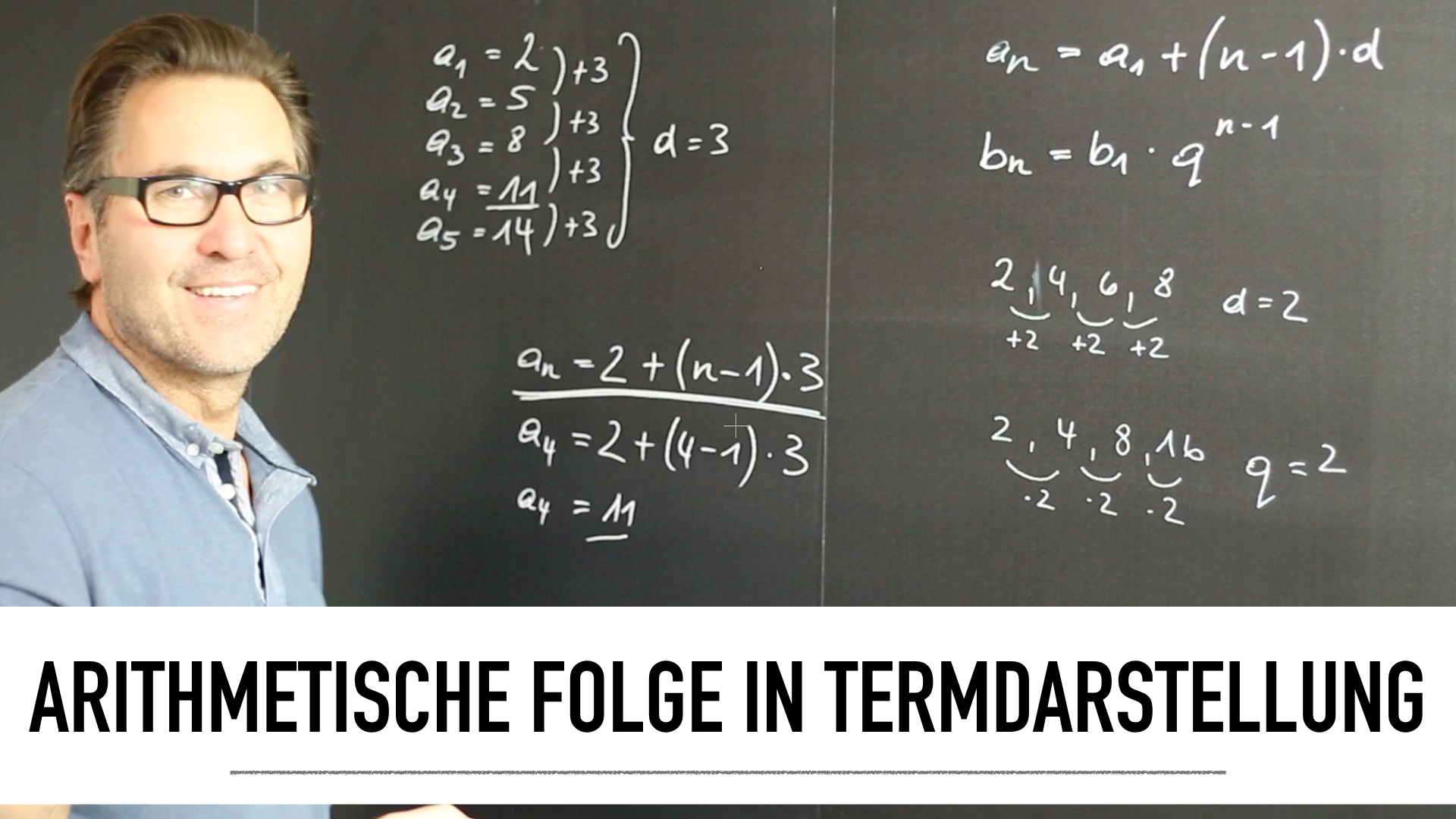
Eine Zahlenfolge ist dann arithmetisch, wenn bei den aufeinander folgenden Gliedern die Differenz immer gleich ist (a2 – a1 = a3 – a2 = a4 – a3 = d). Die Differenz wird mit d bezeichnet. a1 bezeichnet das erste Glied.
Beispiel einer arithmetischen Zahlenfolge: 3, 8, 13, 18, 23, …
Was sind geometrische Folgen?
Eine Folge heißt geometrisch, wenn der Quotient zweier aufeinander folgender Glieder konstant ist. Eine Folge heißt also geometrisch, wenn jedes Glied aus dem vorhergehenden Folgeglied durch Multiplikation mit einer Konstanten, dem Quotienten, hervorgeht.
Eine rekursive Folge ist eine Folge bei der die Bildungsvorschrift vom n-ten Glied vom Vorgängerglied abhängt.
Wenn man hier wissen will, was das achte Glied ist, muss man also das siebente Glied kennen. Für dieses jedoch braucht man das sechste Glied. Das 6. Glied bekommt man aber nur, wenn man das fünfte kennt – so geht es immer weiter.
Man geht also solange rückwärts, bis man beim ersten Glied angekommen ist.
Häufig ist es auch möglich eine rekursive Bildungsvorschrift in eine explizite umzuschreiben und umgekehrt. Explizite Bildungsvorschriften sind dabei die “ganz normalen” Vorschriften.
Um von einer rekursiven auf die explizite Darstellung zu kommen, gehst du wie immer beim Finden der Bildungsvorschrift vor und versuchst erstmal eine Gesetzmäßigkeit zu finden.
Das bekommt man meist gut hin, indem man die ersten Glieder versucht in Abhängigkeit zum ersten zu schreiben.
Man sagt, eine Folge alterniert, wenn sich die Vorzeichen der einzelnen Folgeglieder immer wieder (bis ins Unendliche) ändern, d.h. von “plus” zu “minus” und umgekehrt.
Manchmal wird auch von einer alternierenden Folge gesprochen, wenn die Funktion stets zwischen steigender und fallender Monotonie wechselt. Diese eher unübliche Verallgemeinerung wird weiter unten besprochen.