Eigenvektor und Eigenwert einer Matrix
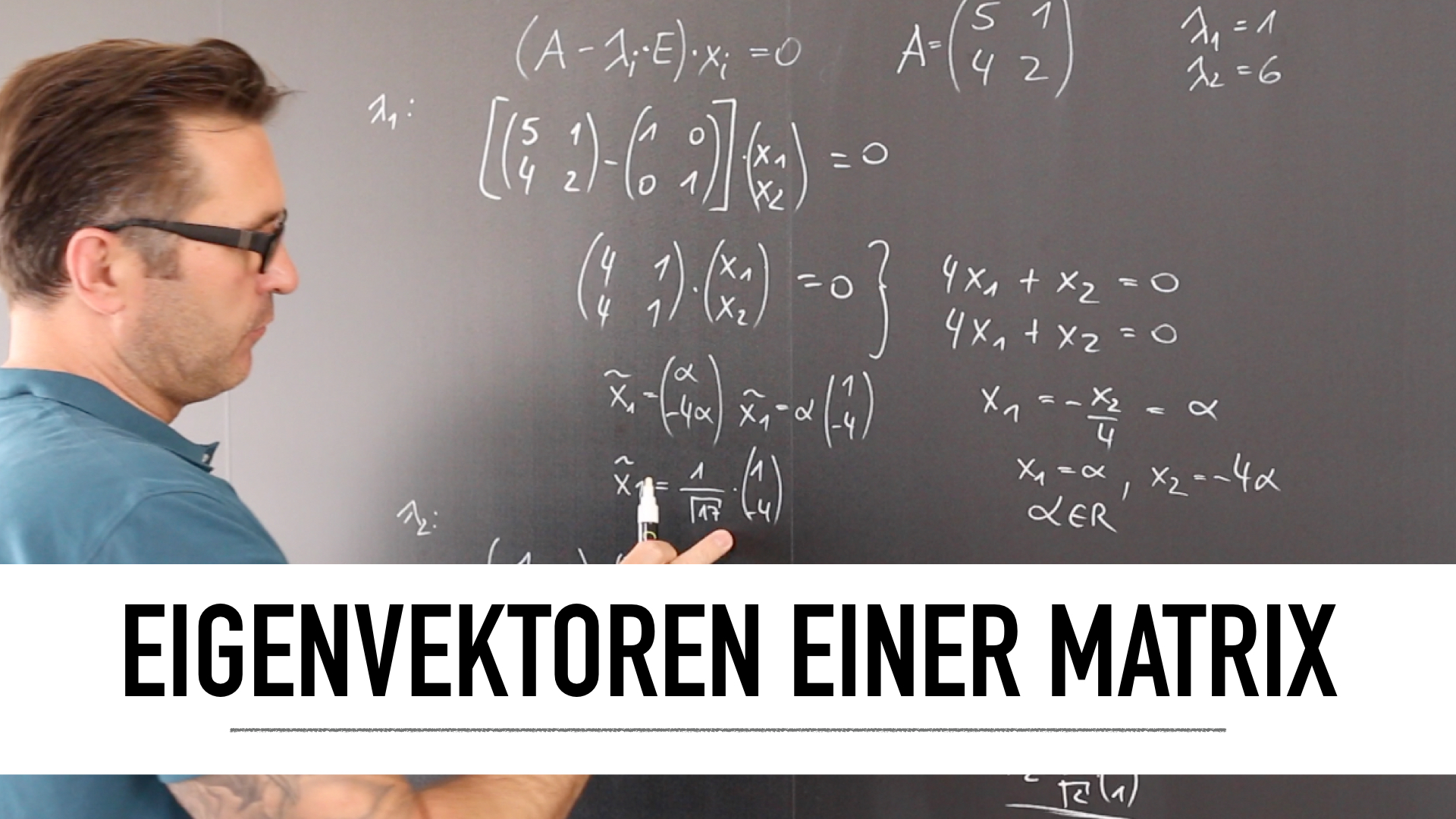
Für quadratische Matrizen gibt es bestimmte Vektoren, die man an die Matrix multiplizieren kann. Sodass man den selben Vektor als Ergebnis erhält, nur mit einem Vorfaktor multipliziert. Solch einen Vektor nennt man Eigenvektor und der Vorfaktor heißt →Eigenwert einer Matrix.
Anhand der Eigenwerte kann man die Definitheit einer Matrix bestimmen. So sind die Eigenwerte von reellen symmetrischen Matrizen reell. Ist die Matrix echt positiv definit so sind die Eigenwerte reell und echt größer Null.
Eigenvektoren einer Abbildung sind in der linearen Algebra vom Nullvektor verschiedene Vektoren, dessen Richtung durch die Abbildung nicht verändert wird. Eigenvektoren skaliert man und bezeichnet den Skalierungsfaktor als →Eigenwert der Abbildung.
Eigenwerte charakterisieren wesentliche Eigenschaften linearer Abbildungen, etwa ob ein entsprechendes lineares Gleichungssystem eindeutig lösbar ist oder nicht.
In vielen Anwendungen beschreiben Eigenwerte auch physikalische Eigenschaften eines mathematischen Modells. Die Verwendung der Vorsilbe „Eigen-“ für charakteristische Größen in diesem Sinne lässt sich auf eine Veröffentlichung von David Hilbert aus dem Jahre 1904 zurückführen.
Eigenvektor und Eigenwerte haben folgende Eigenschaften
Die Eigenvektoren sind nur bis auf einen Faktor bestimmt. Wenn x ein Eigenvektor ist, dann gilt das auch für q⋅x mit beliebigem q.
Ist λ ein Eigenwert der →invertierbaren Matrix A zum Eigenvektor x, so ist 1/λ Eigenwert der inversen Matrix von A zum Eigenvektor x.
Alle Eigenwerte sind stets reell. Im Rahmen der Hauptachsentransformation nennt man die Eigenwerte auch Hauptwerte. Ist die Matrix zudem positiv definit, so sind auch ihre Eigenwerte echt positiv.
Es lässt sich immer eine Orthonormalbasis aus Eigenvektoren angeben.Dies ist eine direkte Folgerung aus dem Spektralsatz. Insbesondere sind Eigenvektoren zu verschiedenen Eigenwerten zueinander orthogonal.
Ein Eigenwert hat unendlich viele zugehörige Eigenvektoren, während ein Eigenvektor immer nur zu einem Eigenwert gehören kann. Multipliziert man die Matrix A mit dem k -fachen Eigenvektor, bleibt der dazu gehörende Eigenwert λ unverändert.
Eigenvektoren sind eindeutig bestimmt, bis auf die Multiplikation mit einem Skalar. Das heißt: Wenn x ein Eigenvektor und a ein Skalar ist, dann ist auch a * x ein Eigenvektor