Flächenschwerpunkt und Linienschwerpunkt berechnen?
Im Speziellen wird der geometrische Schwerpunkt von Linien auch Linienschwerpunkt, von Flächen Flächenschwerpunkt und von Körpern Volumenschwerpunkt genannt. Den Schwerpunkt kannst du in einfachen Fällen durch geometrische Überlegungen ermitteln, oder allgemein durch Integration berechnen. Der Schwerpunkt ist ein Gravizentrum.
Der geometrische Schwerpunkt entspricht dem Massenmittelpunkt eines physikalischen Körpers, der aus einen homogenem Material besteht. Er hat überall die gleiche Dichte und lässt sich deshalb auch rein mechanisch durch Balancieren bestimmen.
Flächen haben also auch einen Schwerpunkt. Die Bestimmung des Flächenschwerpunkts ist z. B. für die Berechnung von →Flächenmomenten zweiten Grades in der Festigkeitslehre erforderlich.
Wie berechne ich den Flächenschwerpunkt?
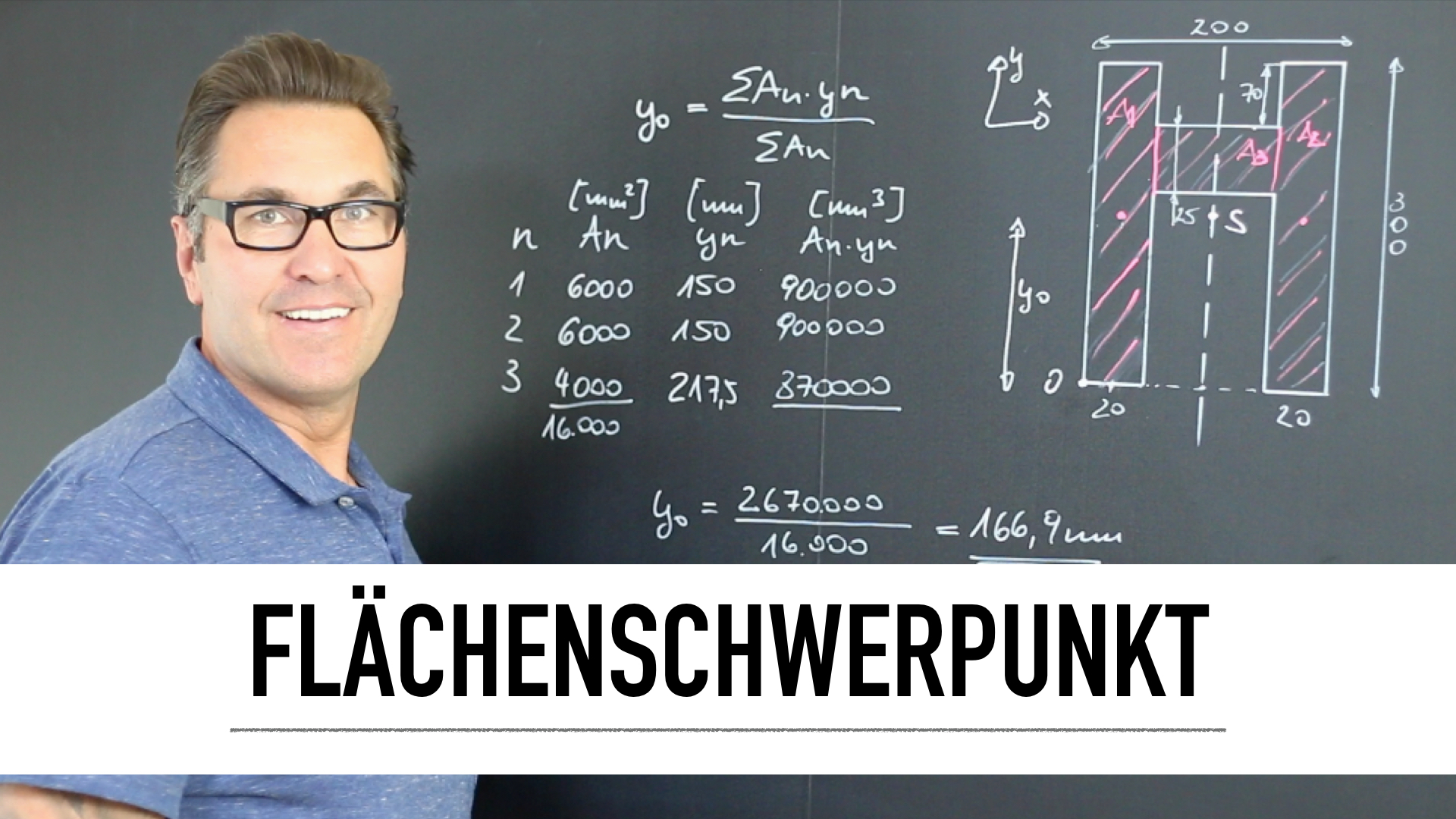
Der Schwerpunkt zusammengesetzter Flächen wird mit dem Momentensatz für Flächen bestimmt. Ist die Fläche unsymmetrisch, muss man die Lage zweier Schwerlinien ermitteln. Ihr Schnittpunkt ist der Schwerpunkt S.
Dafür zerlegst du die gesamte Fläche in Teilflächen mit bekannter Schwerpunktslage, z. B. in ein Rechteck, ein Quadrat etc. Zeichne die Teil-Schwerpunkte S ein. Dann lege einen Momentenbezugspunkt 0 fest, und zwar möglichst so, dass alle Flächenmomente den gleichen Drehsinn erhalten. Wähle die rechte untere Ecke der Fläche und lege durch diesen Punkt ein →rechtwinkliges Achsenkreuz.
Aus den gegebenen Abmessungen berechnest du die Teilflächen, ihre Schwerpunktsabstände x von der y-Achse und y von der x-Achse und die Gesamtfläche A. Prinzipiell kannst du aber überall diesen Bezugspunkt 0 ansetzen.
Wie berechne ich den Linienschwerpunkt?
Für Linienzüge oder zusammengesetzten Linien wird der Schwerpunkt mit dem Momentensatz für Linien bestimmt. Bei unsymmetrischen Linienzügen musst du die Lage für zwei Schwerlinien bestimmen. Im Übrigen gelten die gleichen Regeln wie für den Momentensatz für Flächen.
Zerlege den Linienzug in Teillinien mit bekannter Schwerpunktslage, z. B. in zwei Strecken und zeichnet die Teilschwerpunkte S ein.
Die Lage des Gesamtschwerpunkts S wird angenommen. Dann wird ein Momentenbezugspunkt 0 festgelegt. Bei symmetrischen Linienzügen wählt man dafür zweckmäßig einen Punkt auf der Symmetrielinie.
Aus den gegebenen Abmessungen des Linienzuges berechnet man die Längen der Teillinien, ihre Schwerpunktsabstände x von der y- Achse und die Gesamtlänge l = l1 + l2 +…+ ln.
Der Momentensatz für Linien liefert nun wieder eine Bestimmungsgleichung für die Schwerpunktsabstände, mit dieser kannst du nach x0 und y0 auflösen und die Abstände ausrechnen.